2026 Thesis
Self-Hosted Agentic LLM Framework
Multi-agentic systems via local LLMs, with typed outputs, deterministic verification, and a self-correction loop, producing auditable results.
Pydantic AIOllamaMulti-AgentText-to-SQLPython
Robotics, simulation, applied data, and hackathon builds. Each one links to a deeper write-up with background, features, and outcomes.
Multi-agentic systems via local LLMs, with typed outputs, deterministic verification, and a self-correction loop, producing auditable results.

Visual SLAM based project to localize and navigate the mobile robot in a dynamic environment. Fine-tuned a semantic segmentation model (ICNet) to detect humans as dynamic obstacles so the robot does not treat them as valid landmarks while localizing itself.
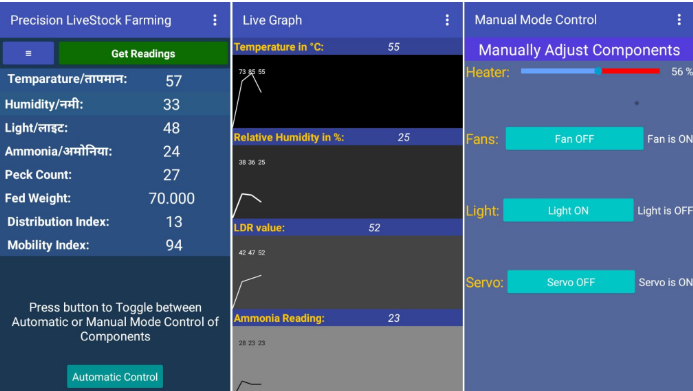
Precision Livestock Farming (PLF) uses advanced technologies to monitor and understand animal behavior and optimize their contribution to the livestock. The prototype monitors broiler chickens using a camera, microphone, and environmental sensors to examine feeding, mobility and distribution, correlated to the well-being and health of the broiler variety.
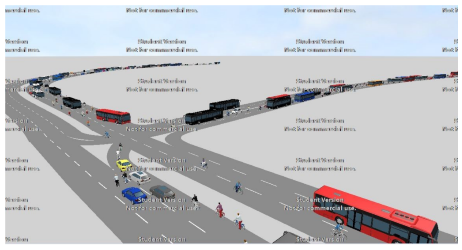
The project addresses traffic jams in Kathmandu Valley, particularly at major intersections like Koteshwor, Jadibuti and Lokanthali, where fixed-timing traffic lights cause delays, deadlocks and higher fuel consumption. The goal was an intelligent system that detects traffic flow, analyzes data, and optimizes traffic light sequences for efficient management.
A graphics project to simulate the ABU Robocon 2019 robots and stage, used to experiment with and build the best robot configuration for the competition. Focused on camera calibration, lighting effects and model rendering.